


主办单位:煤炭科学研究总院有限公司、中国煤炭学会学术期刊工作委员会
1.KRXJ38型智能矿用井下机器人巡检系统已在曹家滩煤矿完成建设及安装调试工作,正处在运行阶段。
2.KRXJ38型智能矿用井下机器人巡检系统是一套井下矿用带式输送机综合智能化巡检系统。它主要由3个子系统组成:托辊磨损实时监测子系统、沿线机器人报警子系统、主电动机轴承振动监测子系统。
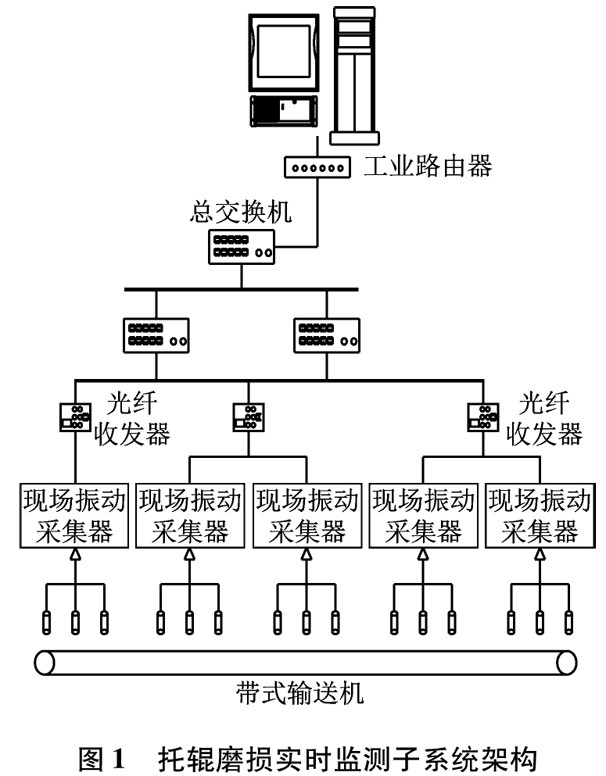
(1)输煤系统托辊磨损实时监测子系统
该系统通过对托辊支架的振动监测和分析及对托辊磨损状况的判断,给出报警指示信号。整个系统由振动传感器、数据采集器、信号网络传输设备、上位机电脑等组成,可智能监测托辊突发故障及磨损状况,并给出指示信号。托辊磨损实时监测子系统在托辊侧方安装振动传感器,间距不大于30 m,每300 m设置1台数据采集器,通过网络传输至后台上位机电脑。然后,判断托辊的实时磨损状态并发出指示报警信号,可以避免导致托辊发生故障引起火灾或停机事故。
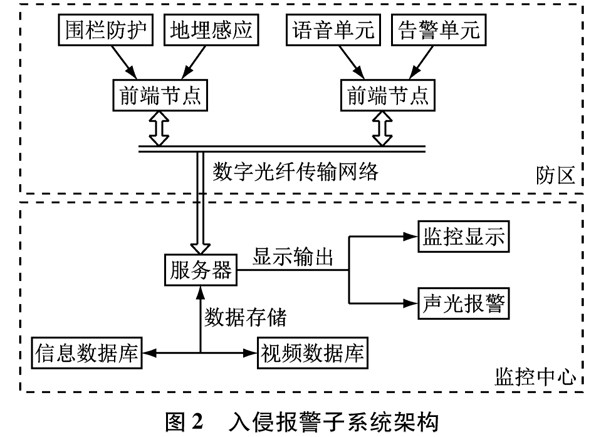
(2)沿线机器人报警子系统
沿线机器人报警子系统由报警主机、防区处理单元、振动感应光缆、通讯光缆、多种传感器、报警控制服务器等组成。
(3)主电动机轴承振动监测子系统
井下矿用带式输送机的主电动机轴承在全生命周期运行过程中,其故障特性是一个逐渐发展的过程,从初级故障至故障加剧至轴承使用寿命结束。在此故障变化过程中,其振动也存在一种变化趋势。通过找到该种趋势特征值的变化,来评估主电动机轴承的运行及使用状态。
转载本文须保留本网站注明的“来源/参考文献+中国煤炭行业知识服务平台”,侵权必究。


主办单位:煤炭科学研究总院有限公司 中国煤炭学会学术期刊工作委员会
