-
全部



主办单位:煤炭科学研究总院有限公司、中国煤炭学会学术期刊工作委员会
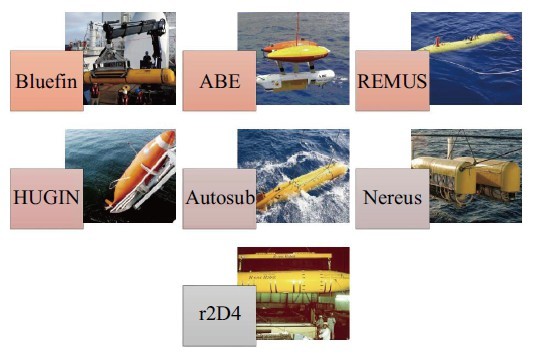
国外典型的AUV
1.自主水下机器人(AUV)相比于其他类型的水下机器人平台,具有自主性高、探测范围大等优点,在海洋环境观测、海洋资源调查、海洋安全防卫等领域得到了广泛的应用,是人类认识海洋的步伐由近海到深远海迈进所借助的水下核心系统平台。
2.据统计,当今世界上约有一百余种AUV,但除了少数厂商提供的商业化产品之外,半数以上还只是试验样机,可以说AUV 平台技术还没有达到广泛成熟应用阶段,其中重要的技术瓶颈之一就是AUV 的智能化水平不足。
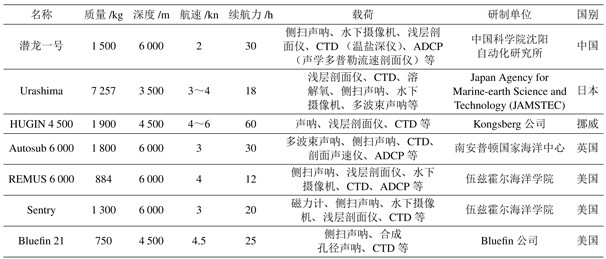
3.国内外典型AUV 的主要参数
4.AUV 和人工智能几乎诞生于相同的年代.1956年的达特茅斯会议标志着人工智能的诞生,而世界上第一台AUV 于1957 年在华盛顿大学应用物理实验室设计并建造完成.在过去的60 多年里,AUV 和人工智能共同走过了曲折漫长的发展历程。
5.中国工程院高文院士将人工智能的发展大致归纳为3 个阶段:基于符号逻辑的推理证明(1956~1976)、基于人工规则的专家系统(1977~2006)和大数据驱动的深度神经网络(2007 ~).而AUV 也经历了预编程式、自主式和智能式的发展历程。
6.AUV 核心关键技术中的人工智能方法一:水下声光学探测识别技术。探测技术可以分为主动探测和被动探测2 类,声呐和光学相机是AUV 平台所搭载的常规主被动探测装置,可以为AUV 提供不同尺度下的探测能力.借助光学相机和声呐实现AUV 对外部环境的感知理解,是引导AUV 开展后续作业的前提和保障。
7.AUV 核心关键技术中的人工智能方法二:AUV 路径规划技术。作为自主水下无人航行系统,AUV 避障和路径规划是保障其能够安全航行并在有限资源载荷的条件下长期、高效开展作业的核心技术.根据AUV 所处的外部环境信息获取情况,AUV 的路径规划问题分为全局路径规划和局部路径规划2 类.常见的路径规划方法主要包括人工势场法、A* 算法、快速扩展随机树(RRT)算法、RRT*、遗传算法(GA)、粒子群优(PSO)算法等方法。
8.AUV 核心关键技术中的人工智能方法三:AUV 运动控制技术。AUV 系统在运动中的智能性表现在非确定性的环境下按照其自身的标准选择最优的动作输出.AUV 在实际应用中的控制方法主要有PID(比例-积分-微分)控制器、神经网络控制器和模糊逻辑控制器.但是,这些方法在实际运用中都存在着一些模型参数难以确定的缺陷。
9.AUV 核心关键技术中的人工智能方法四:AUV 故障诊断与健康预测技术。现有的AUV 故障诊断方法可以分为基于规则的方法、基于模型的方法和基于数据驱动的方法3 类.其中基于规则和基于模型的故障诊断方法已经在现有AUV 平台上获得了实际应用.推进器是AUV 的动力来源,是AUV 系统的最基本和最核心的单元,推进电机的长时间工作损耗、推进器桨叶材质疲劳、外部附着等内外部因素容易引起推进效率降低乃至发生故障,是AUV 系统中最常见的故障来源.现阶段AUV 故障诊断方面的学术研究也主要是围绕推进器开展。
参考文献:《AUV 智能化现状与发展趋势》
转载本文须保留本网站注明的“来源/参考文献+中国煤炭行业知识服务平台”,侵权必究。


主办单位:煤炭科学研究总院有限公司 中国煤炭学会学术期刊工作委员会
