


国家煤矿安全监察局2019 年第1 号文件《煤矿机器人重要研发目录》将“露天矿卡无人驾驶系统” 列为重点研发项目,露天矿无人矿卡发展趋势是什么?
-
全部
主办单位:煤炭科学研究总院有限公司、中国煤炭学会学术期刊工作委员会
国家煤矿安全监察局2019 年第1 号文件《煤矿机器人重要研发目录》将“露天矿卡无人驾驶系统” 列为重点研发项目,露天矿无人矿卡发展趋势是什么?
1.无人矿卡车辆的主要任务是特定路线、场景上的物料运输。车辆通过感知周围环境,依据获取的信息决策判断,控制车辆沿期望轨迹行驶。涉及的关键技术为环境感知、精确定位、决策与规划、控制与执行四个模块。
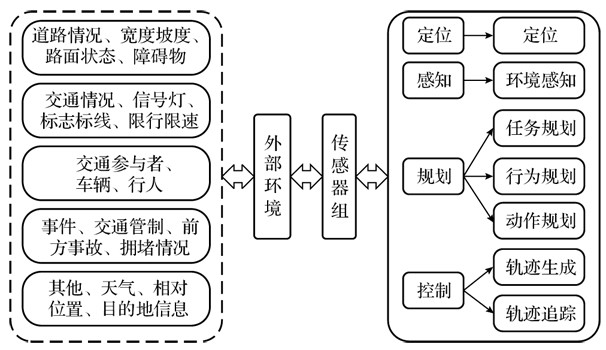
无人矿卡关键技术
2.露天矿无人矿卡发展趋势为:
1)人工智能、视觉感知:目前激光雷达是矿山感知系统中的主要设备,但雷达数据稀疏、价格昂贵,而相机携带丰富的数据信息,且对于复杂的路况检测,借助深度学习能够满足高精度需求。深度学习在算法和样本量足够的情况下,视觉感知的准确率可以达到99.9%以上。随着智能化算法的发展,相机将以其低廉的价格、丰富的环境信息,在感知领域发挥越来越重要的作用。
2)自主定位、多传感器融合:当前无人矿卡运输系统主要应用GPS和惯性导航组合定位,激光雷达和高精度地图辅助定位,但部分矿区GPS信号覆盖差,难以保证信号的稳定性和连续性,且矿区环境多变,这对高精度地图的制作和更新带来挑战,另外,对于矿山运输中的装载、卸载、会车等关键环节,往往需要精准定位,发展基于车辆所处环境的自主定位方式,利用多传感器信息融合是实现车辆精准定位的有效途径。
3)云计算、云存储:鉴于无人驾驶对运算量的巨大需求,依赖5G网络大带宽、低时延、广连接的特性,以满足超大数据量的低时延传输,实现车队之间协同运转,共享车队感知数据,并让车载服务器走上云端,解放车上空间。另外,云存储系统在采矿业中有明显的优势,可以协调多个矿区的生产、设备运行等。
4)车路协同、辅助智能:全开放环境的无人驾驶以目前技术短期内很难实现,即使在特定场景依然难以保障安全高效的长时间运行,增加基础建设以辅助驾驶,就可以降低系统难度,从实现落地,以及安全的角度来看,未来的无人驾驶不会是简单的单车智能,而是逐步走向车路协同的模式。
参考文献:《露天矿无人驾驶自卸卡车发展综述》
转载本文须保留本网站注明的“来源/参考文献+中国煤炭行业知识服务平台”,侵权必究。


主办单位:煤炭科学研究总院有限公司 中国煤炭学会学术期刊工作委员会
